LES MOTEURS A COURANT CONTINU
Un moteur électrique transforme l'énergie électrique qu'il reçoit en énergie mécanique. Son rôle est donc à partir du courant absorbé, il entraîne un système mécanique.
1. Moteur à excitation séparée
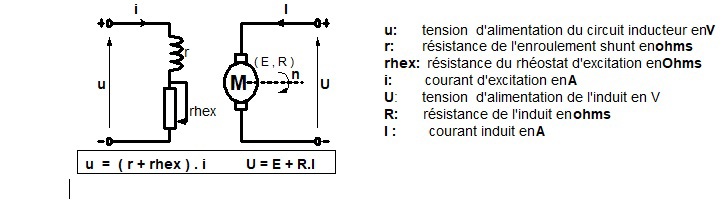
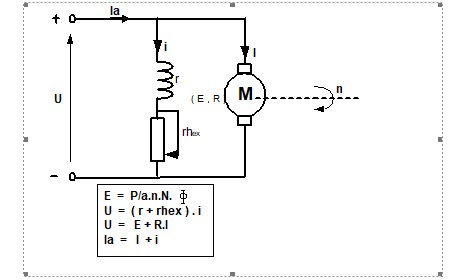
a) Schéma de principe et équations :
b) Importance du rhéostat de démarrage : Rhd
De l'expression U = E + R.I, on tire I = U – E / R soit I = (U – E) / R. Au démarrage la vitesse est nulle et donc I = Id = U / R (valeur très élevée car R est faible). Afin de limiter cette pointe de courant, on insère un rhéostat de démarrage Rhd en série avec l'induit. Le courant devient alors Id = U / (R + Rhd ).
Donc il est dangereux de démarrer un moteur à courant continu sous sa tension nominale sans rhéostat de démarrage.
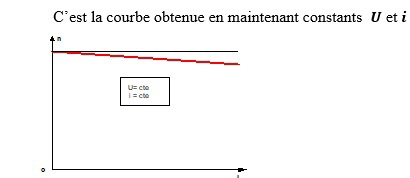
c) Étude à vide :
Dans cette partie nous allons étudier le réglage de la vitesse en fonction :
• De la tension d'alimentation de l'induit
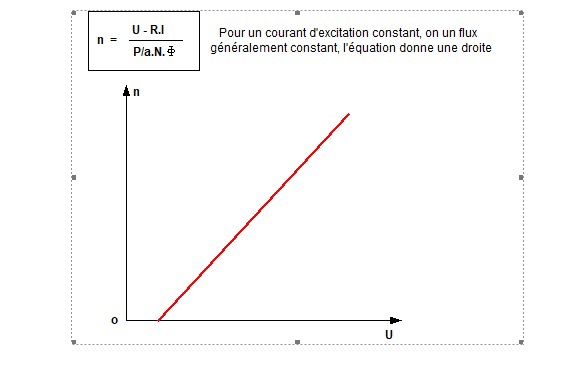
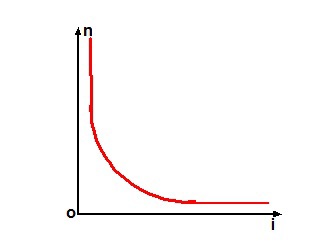
Du courant d'excitation


• Étude en charge :
Caractéristique électromagnétique de la vitesse
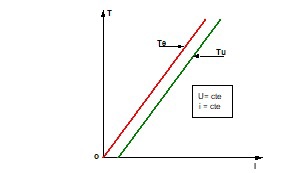
Caractéristique électromagnétique du couple : T = f (I)
A flux constant, le couple en fonction du courant induit I est une droite.
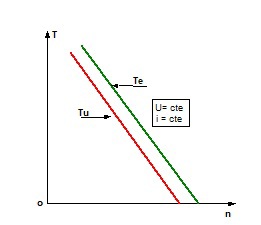
Caractéristique mécanique du couple : T = f (n)
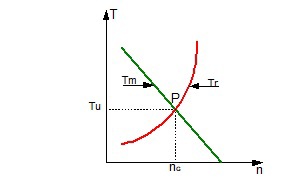
Point de fonctionnement en charge :
Le point de fonctionnement d'un moteur de couple Cem entraînant une charge de couple résistant Cr est l'intersection de ces deux couples. Ce point permet de déterminer la vitesse et le couple utile Cu du groupe par projection ou mathématiquement en faisant l'égalité des deux équations,
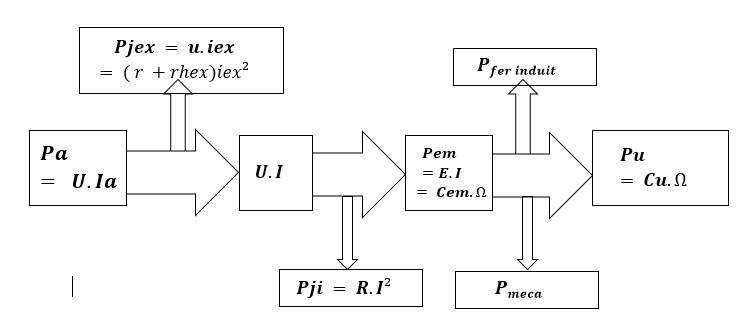
d) Bilan des puissances
Puissance absorbée (dans l'induit et dans l'inducteur) : Pa = U.I + u.iex
Pertes par effet joule dans l'induit : Pji = R.I²
Pertes par effet joule dans l'inducteur : Pjex = u.iex = ( r+rhex ) .iex²
Puissance électromagnétique = puissance électrique totale : Pem = Pet = E.I = Cem.Ω
Pertes constantes = pertes collectives : PC = Pm + Pfer
Puissance utile = puissance reçue par la charge :


e) Inversion du sens de rotation :
Pour inverser le sens de rotation d'une moteur à courant continu il faut ;
soit inverser le sens du flux, donc inverser le sens du courant d'excitation
soit inverser le sens du courant dans l'induit.
2. Moteur à excitation shunt
Tout ce qu'on vient de voir pour le moteur à excitation séparée est valable pour le moteur à excitation shunt sauf au niveau du schéma, des équations et du bilan de puissance.
a) Schémas de principe et équations :
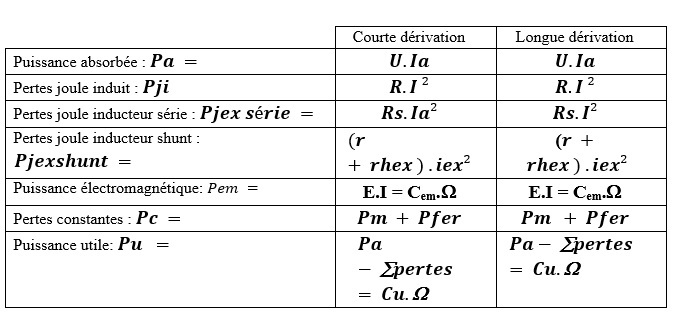
b) Bilan des puissances
Puissance absorbée (dans l'induit et dans l'inducteur) : Pa = U.Ia
Pertes par effet joule dans l'induit : Pji = R.I²
Pertes par effet joule dans l'inducteur : Pjex = u.iex = ( r+rhex ) .iex²
Puissance électromagnétique = puissance électrique totale : Pem = Pet = E.I = Cem.Ω
Pertes constantes = pertes collectives : Pc = Pm + Pfer
Puissance utile = puissance reçue par la charge :

Moteur à excitation série
L'inducteur en série avec l'induit, est traversé par le courant induit qui est un courant fort. On utilise donc un enroulement différent de celui de l'enroulement shunt qui supporte un courant faible.
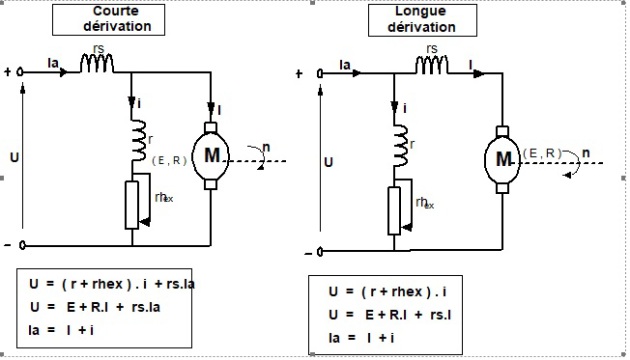
a) Schéma et équations
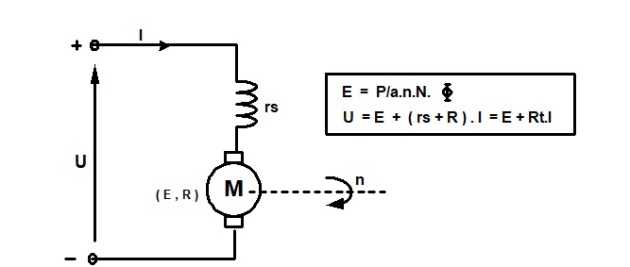
Pour le démarrage il faut aussi un rhéostat de démarrage pour limiter la pointe de courant.
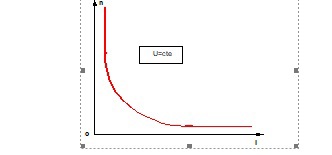
Étude à vide
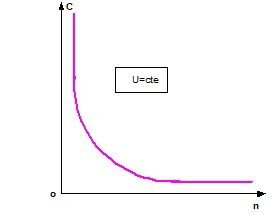
L'expression de la vitesse n = ( U – Rt.I ) / K.I car le flux ne peut être constant ,puisqu'il varie avec le courant d'excitation qui est le même que le courant induit.
On voit immédiatement que si I tend vers zéro, la vitesse n tend vers l'infini et on dira que le moteur s'emballe.
Donc à vide le moteur série absorbe un faible courant I0, la vitesse prend une valeur très élevée : le moteur série ne doit jamais fonctionner à vide ou avec une faible charge.
Étude en charge
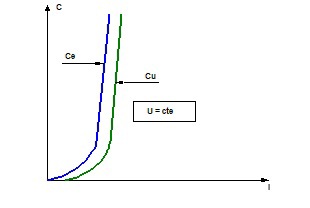
• Caractéristique électromécanique de la vitesse
• Caractéristique électromécanique du couple
• Caractéristique mécanique
On peut l'obtenir à partir des deux caractéristiques précédentes
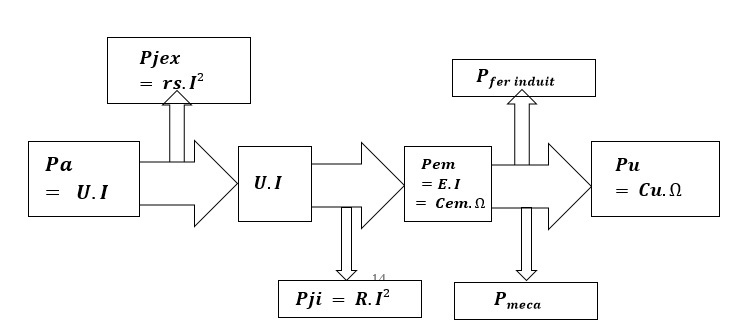
Bilan des puissances :
Puissance absorbée (dans l'induit et dans l'inducteur) : Pa = U.I
Pertes par effet joule dans l'induit : Pji = R.I²
Pertes par effet joule dans l'inducteur : Pjex = rs .I²
Puissance électromagnétique = puissance électrique totale : Pem = Pet = E.I = Cem.Ω
Pertes constantes = pertes collectives : Pc = Pm + Pfer
Puissance utile = puissance reçue par la charge :

Moteur à excitation composée
Deux montages sont possibles selon le branchement l'enroulement shunt par rapport à l'enroulement série.
a) Schémas et équations
b) Caractéristiques
Puisqu'il y'a deux flux (flux créé par l'enroulement série et celui créé par l'enroulement shunt), on constate qu'il y'a possibilité d'avoir la somme ou la différence des deux flux.
Dans le 1er cas on dit que le moteur fonctionne à flux additifs et que la vitesse croit fortement avec la charge.
Dans le 2ème cas on dit que le moteur fonctionne à flux soustractifs et la vitesse est presque constante quelque soit la charge.
Bilan des puissances