La base de Frenet
Méthode :
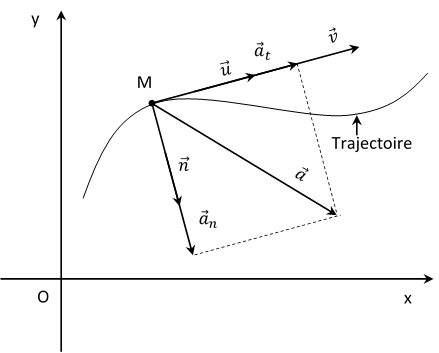
Il est parfois commode en particulier lorsque l'on connaît la trajectoire , d'exprimer le vecteur accélération d'un point mobile en fonction des vecteurs unitaires et de la base dite de Frenet:
est un vecteur unitaire porté par la tangente à la trajectoire en M, position du point (est orienté de préférence dans le sens du mouvement du point mobile M).
est un vecteur unitaire perpendiculaire à et orienté vers l'intérieur de la concavité de la trajectoire.
Dans la base de Frenet, l'expression du vecteur vitesse relativement au repère par rapport auquel le mouvement est étudié est :.
Le vecteur accélération est : .
On montre que .
\(R\) est le rayon de courbure de la trajectoire. C'est le rayon du cercle tangent à la trajectoire en \(M\).
On a alors .
Le vecteur accélération a alors deux composantes :
Une composante tangentielle : elle ne dépend que de la variation de la valeur de la vitesse.
Une composante normale : elle ne dépend que de la variation de la direction du vecteur vitesse.
exprime la courbure de la trajectoire : Lorsque \(R\) tend vers l'infini, tend vers 0 et la trajectoire est rectiligne : une trajectoire rectiligne peut alors être considérée comme une trajectoire circulaire de rayon infini.
Fondamental :
Il est important de distinguer la base de Frenet du repère par rapport auquel se fait l'étude du mouvement. Le repère est une donnée fondamentale pour étudier le mouvement tandis que la base de Frenet est une donnée technique qui simplifie les expressions de la vitesse et de l'accélération déterminées dans le repère.